Вектор
Величины,
которые
кроме
скалярного
значения
имеют
направление,
называются
векторами. Другими
словами,
любая
упорядоченная
пара точек (А
и В) задают
направленный
отрезок или
вектор АВ.
Термин
"вектор" (от
лат. vector - переноситель)
ввел
Гамильтон в 1848
году. Сейчас
их изучают в
школе, но вся
векторная
алгебра
(теоретически)
и физика
(практически)
связаны с
векторами. В данной
статье
даются
основы
векторов с
математической
и
программерской
точки зрения.
Что такое
вектор?
Посмотрим на
рисунок:
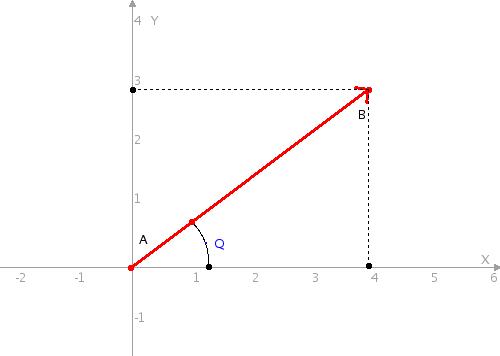
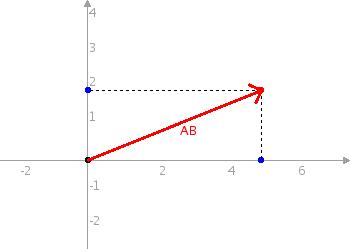
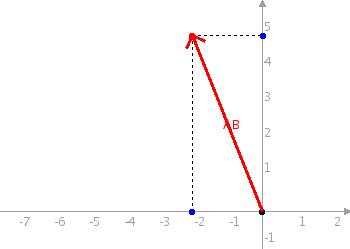
Рис. 1
Вектор АВ
Нормальный вектор :-) Еще одно достоинство векторов: начальная точка А может быть поставлена не в начало координат, а в любое место плоскости XY. Почему достоинство? Поясню: если бы так не было (т.е. каждая точка имела координаты), то наш вектор обозначался бы 4-мя цифрами, а на самом деле координат только две. Теперь о знаке. Если нужно чтобы вектор АВ принял противоположный знак нужно просто нарисовать вектор в противоположную сторону, как показано на рисунке 2.
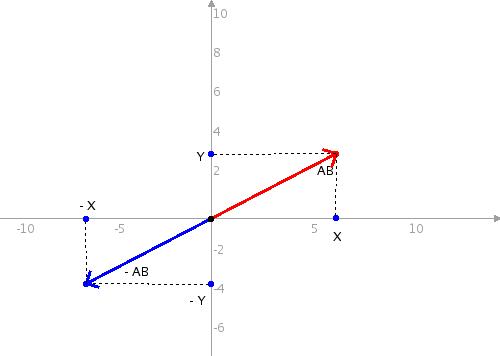
Рис. 2
Вектор АВ и
противоположный
ему
Длина (или
модуль)
находится
как корень
квадратный
из сумы
квадратов
векторных
координат.
Формула:
На С++ функция нахождения длинны такая:
#define d double
d vec_length(d x, d y)
{
return pow((pow(x,2)+pow(y,2)),0.5);
}
Многие знают,
как
складывать и
вычитать
векторы, как
множить их на
константу
и.т.д. Но еще можно
их вращать
около центра
координат,
переносить
конец
векторов в
любую точку
плоскости и, скомбинировав
все
сказанное - вращать
их вокруг
заданной
точки.
На С++ приведены
примеры вращения вокруг начала координат:
#include <math.h>
#define d double
struct l2vektor
{
d x;
d y;
}
int main()
{
d ang = M_PI/2;
l2vektor a,b;
a.x=5;
a.y=2; //
вектор а(5,2); рис. 3
b.x=a.x*cos(ang)+a.y*sin(ang);
b.y=a.y*cos(ang)-a.x*sin(ang);
/*после выполнения этого кода: b(-2,5); рис. 4
}
|
|
|
Вращение
конечной
точки вокруг
заданной - дело,
по сути,
простое.
Пожалуйста:
#include "lvektor.h"
#include <math.h>
l2vektor rot_vek(l2vektor o, double ax, double ay, double ang)
{
l2vektor a;
a.x = o.x
- ax;
a.y = o.y - ay;
double x, y;
x =
a.x*cos(ang)+a.y*sin(ang);
y = a.y*cos(ang)-a.x*sin(ang);
a.x = x + ax;
a.y = y + ay;
return a;
}
Все объясняет
рисунок 5
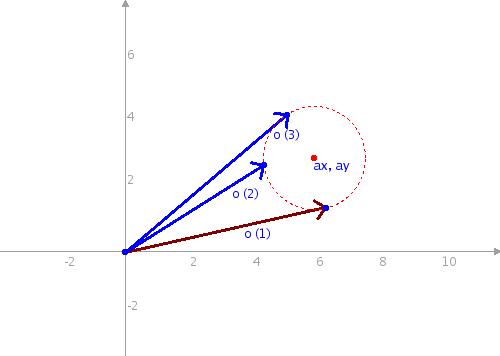
Рис. 5 Вектор о участвует во вращении вокруг точки
"Родной"
вектор о (1) будучи,
повернут на
какой-то угол
ang вокруг
точки,
имеющей
координаты ax,
ay перешел в
"не родной" вектор
о (2).
Тримерный
вектор от
нашего
отличается
только тем,
что
находится в
пространстве
и имеет одну
дополнительную
координату z.
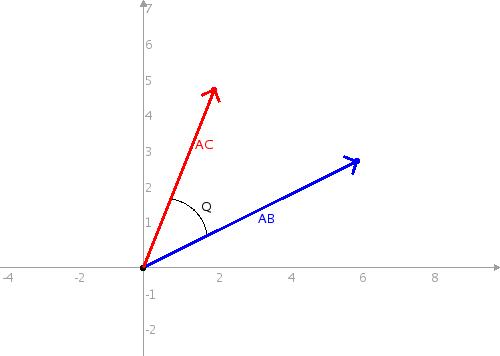
Рис. 6 Угол
между
векторами
Теперь
перейдем к
углу между
векторами (как
видно из
рисунка этот
угол - Q). Эта
формула
определяется
отношением
скалярного
произведения
к
произведению
модулей
(длин)
векторов:
На С++:
#include <math.h>
double scal_vek(l2vektor a, l2vektor b)
double abs_vektor(l2vektor a)
double ang_mvek(l2vektor a, l2vektor b)
{
return acos(scal_vek(a,b)/(abs_vektor(a)*abs_vektor(b)));
}
double scal_vek(l2vektor a, l2vektor b)
{
return a.x*b.x + a.y*b.y;
}
double abs_vektor(l2vektor a)
{
return pow((pow(a.x,2)+pow(a.y,2)),(0.5));
}
Если хотите,
скачайте
модуль для
С/С++ (тут
для Windows) (тут
для Linux). Там Вы
найдете дву-
и трехмерные
векторы,
направляющие
косинусы пространственных
векторов
и.т.д. А (тут
для Windows) (тут
для Linux) Вы
найдете
расширенный
"векторный" модуль,
в котором
представлены
функции
вращения
векторов
вокруг заданной
точки.
На этом
разрешите
закончить и
откланятся.